Neue Open-Source-Repository für Fahrzeugdynamik-Zustandsschätzung veröffentlicht
Wir haben ein neues Open-Source-Repository 3D Vehicle Dynamics State Estimation veröffentlicht, welches eine robuste sowie modulare Lösung für die Schätzung der Fahrzeuglage (Pose) und Geschwindigkeit in autonomen Fahrsystemen bietet. Unsere Software ist nahtlos in einer Linux Docker-Umgebung nutzbar und basiert auf ROS2 Humble, wodurch Forschern und Entwicklern fortschrittliche Werkzeuge zur Zustandsschätzung zur Verfügung stehen.
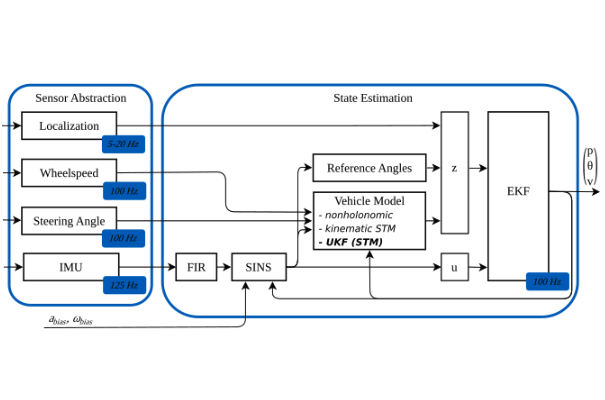
Im Kern implementiert der Code in unserem Repository einen 3D-Punktmassen-basierten Extended Kalman Filter (EKF), der die Fahrzeugpose (Position und Orientierung) sowie die Geschwindigkeit schätzt. Dabei wird numerische Stabilität gewährleistet, ohne auf spezifische Fahrzeug- oder Reifenparameter angewiesen zu sein. Die Methode wird durch die Integration von Geschwindigkeitsschätzungen eines Einspurmodell-basierten Unscented Kalman Filters (UKF) weiter verbessert, was zu höherer Genauigkeit und Robustheit führt.