Wir freuen uns sehr, Yuan Gao im Lehrstuhl für Autonome Fahrzeugsysteme (AVS) an der Technischen Universität München begrüßen zu dürfen. Yuan bringt umfangreiches Wissen und Erfahrung mit, und wir sind gespannt auf die Beiträge, die er in seiner neuen Rolle als Doktorand leisten wird.
Yuan hat…
[weiterlesen]
Unser AVS Lab bietete im Rahmen der Projektwoche 2025 eine neue und innovative Vorlesung namens „Future Mobility Camp“ an. Die Woche vom 13. bis 17. Januar widmete sich dem Thema zukunftsweisender Mobilität und kombiniert Theorie mit praktischen Elementen.
Studierende hatten die Möglichkeit, sich…
[weiterlesen]
Liebe Mitglieder, Kolleginnen, Kollegen und Freunde des AVS-Labs,
das Jahr 2024 neigt sich dem Ende zu – eine gute Gelegenheit, innezuhalten und auf die vergangenen Monate zurückzublicken. Es war ein Jahr voller Herausforderungen, Erkenntnisse und Erfolge, die wir dank des Engagements und der…
[weiterlesen]
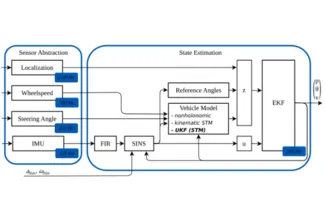
Neue Open-Source-Repository für Fahrzeugdynamik-Zustandsschätzung veröffentlicht
Wir haben ein neues Open-Source-Repository 3D Vehicle Dynamics State Estimation veröffentlicht, welches eine robuste sowie modulare Lösung für die Schätzung der Fahrzeuglage (Pose) und Geschwindigkeit in autonomen…
[weiterlesen]
Das „NOKOV New Generation Star Project“ ist eine Initiative von NOKOV Motion Capture mit dem Ziel, aufstrebende Wissenschaftler auf dem Gebiet der Robotik auszuzeichnen und zu unterstützen. Auf der IROS 2024 wurden 25 neue Stipendiaten mit dieser Anerkennung ausgezeichnet, zu denen auch der Leiter…
[weiterlesen]
Die Teammitglieder unseres AVS Labs werden diese Woche die IROS 2024 in Abu Dhabi besuchen. Wir werden ein fantastisches Programm mit Workshops, Vorträgen, Postern und Wettbewerben mit brillanten Co-Autoren und Co-Organisatoren haben. Im nachfolgenden finden Sie unsere Beiträge. Melden Sie sich bei…
[weiterlesen]
Herzlich willkommen zurück an der TU München! Das AVS lab wünscht allen Studierenden an der TUM einen guten Start in das neue Winteresmester 2024/2025. Wir hoffen, dass Ihr Euch auf neue Herausforderungen und spannende Erfahrungen in euerem Studium freut.
Wir vom AVS Lab bieten dieses…
[weiterlesen]
Unser Autonomous Vehicle Systems Lab (AVS) der Technischen Universität München (TUM) hat kürzlich seine Präsenz auf YouTube und LinkedIn erweitert. Auf dem neuen YouTube-Kanal präsentiert das Lab spannende Einblicke in seine Forschung rund um autonome Fahrzeugsysteme. Zusätzlich bietet der…
[weiterlesen]
Der Münchner Cluster für die Zukunft der Mobilität in Metropolregionen (MCube) hat vom Bundesministerium für Bildung und Forschung (BMBF) grünes Licht für eine zweite Förderperiode erhalten, die mit rund 15 Mio. Euro finanziert wird. MCube vereint wichtige Akteure aus Wissenschaft, Wirtschaft und…
[weiterlesen]
Wir freuen uns, die Veröffentlichung unseres neuen Papers "FRENETIX: A High-Performance and Modular Motion Planning Framework for Autonomous Driving" in IEEE Access bekannt zu geben.
In diesem Paper stellen wir FRENETIX vor, ein modulares Motion-Planning-Framework, das entwickelt wurde, um die…
[weiterlesen]