Software
Willkommen im Software-Bereich unseres Labs! Wir sind ein Team von innovativen Forschern und Entwicklern, die daran glauben das Technologie und Software die Welt verändenr kann. Unser Lab widmet sich der Entwicklung neuer Software, die reale Probleme für autonome Fahrzeuge löst, um diese anschließend für jedermann verfügbar zu machen.
Wir sind stolz darauf, Teil der Open-Source-Community zu sein, in der Wissen frei geteilt wird und Zusammenarbeit den Fortschritt vorantreibt. Das gesamte von uns erstellte Lehrmaterial und die von uns entwickelte Software wird als Open Source veröffentlicht, was bedeutet, dass jeder auf unsere Arbeit zugreifen, sie nutzen und darauf aufbauen kann.
Auf dieser Seite findet Ihr eine umfassende Liste aller Software, die unser Lab entwickelt und veröffentlicht hat. Von hochmodernen Tools für die Datenanalyse über Simulationen für autonome Fahrzeuge bis hin zu Algorithmen, die eine sichere und vertrauenswürdige Autonomie für ein breites Spektrum hochintegrierter autonomer Fahrzeuganwendungen ermöglichen.
In unserem Labor sind wir davon überzeugt, dass Software die Macht hat, etwas zu bewirken. Egal, ob Sie Forscher, Entwickler oder einfach nur technikinteressiert sind, wir laden Sie ein, uns bei der Entwicklung der nächsten Generation von intelligenten autonomen Fahrzeugen zu unterstützen.
Besuche unsere Github-Seite
3D Lidar SLAM und Lokalisierung für F1TENTH

Dieses Repository enthält die notwendigen Treiber für den Betrieb der F1Tenth/RoboRacer-Fahrzeuge, die mit dem Livox MID-360 3D LiDAR-Sensor ausgestattet sind (Livox MID-360 Produktseite). Außerdem enthalten wir ein robustes und getestetes 3D-LiDAR-SLAM-Paket, das speziell für die Verwendung mit diesem LiDAR validiert wurde.
3D Vehicle Dynamics State Estimation
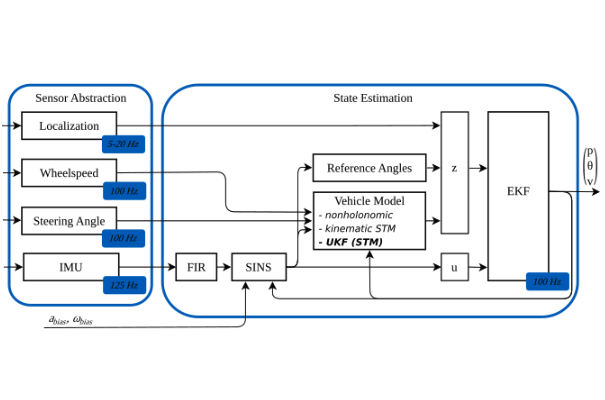
Für die Lokalisierung und Positionsschätzung autonomer Fahrzeuge entwickelten wir einen neuartigen 3D-Punkt-Masse-basierten erweiterten Kalman-Filter (EKF). Durch die Fusion verschiedener Informationen, können wir die Position, Orientierung und Geschwindigkeit sehr genau schätzen und damit auch auf 3D Umgebungen für eine hochgenaue State Estimation sorgen. Dieses Repository enthält den Code für die 3D State Estimation.
ESP: Extro-Spective Prediction for Long-term Behavior Reasoning in Emergency Scenarios

In dieser Arbeit erstellen wir einen neuen Datensatz, der sich auf die langfristige Vorhersage von unauffälligen Zustandsänderungen in der Historie konzentriert, die zu einem Notfallereignis führen. Dieses Problem nennen wir Extro-Spective Prediction (ESP). Der ESP-Datensatz mit semantischen Umgebungsinformationen beinhaltet über 2k+ Kilometer an Fahrstrecke und konzentriert sich auf herausfordernde Szenarien, die auf Notfallereignissen basieren.
TUM EDGAR: Digital Twin eines autonomen Fahrzeugs

Ein digitaler Zwilling ist eine virtuelle Darstellung eines physischen Objekts oder Systems. Im Falle unseres Repositorys dient der digitale Zwilling als digitales Gegenstück zu unserem autonomen Forschungsfahrzeug. Er erfasst das Verhalten, die Leistung und die Eigenschaften des Fahrzeugs in einer virtuellen Umgebung. Mit diesen Informationen könnt ihr das EDGAR-Fahrzeug in verschiedenen 2D- und 3D-Simulationsumgebungen simulieren.
FlexMap Fusion: Multi-LiDAR Localization and Mapping Pipeline

Autonome Fahrzeuge benötigen genaue und robuste Lokalisierungs- und Kartierungsalgorithmen, um sicher und zuverlässig in städtischen Umgebungen zu navigieren. Wir stellen eine neuartige, auf Sensorfusion basierende Pipeline für Offline-Kartierung und Online-Lokalisierung auf der Grundlage von LiDAR-Sensoren vor. Der vorgeschlagene Ansatz nutzt vier LiDAR-Sensoren. Die Kartierungs- und Lokalisierungsalgorithmen basieren auf dem KISS-ICP und ermöglichen Echtzeitleistung und hohe Genauigkeit.
FRENETIX: Motion Planner for Autonomous Vehicles

Autonome Fahrzeuge benötigen ein spezielles Softwaremodul, das eine sichere und effiziente Trajektorie ermöglicht. Wir veröffentlichen hier einen Frenet-Trajektorienplanungsalgorithmus, der Trajektorien in einem Sampling-basierten Ansatz generiert. Das Repository bietet einen python-basierten und einen C++-beschleunigten Bewegungsplaner, der polynomiale Trajektorien in einem kurvenförmigen Koordinatensystem abtastet und sie auf Machbarkeit und Kosten auswertet.
ROS 2 Latency Analysis

ROS2 Software Systeme bestehen meist aus einer hohen Anzahl von Publisher und Subscriber Modulen. Unsere Softwaretool erstellt einen Datenflussgraphen (DFG) für eine ROS2-Software für autonomes Fahren mit Hilfe einer statischen Codeanalyse. Dadurch können IDatenabhängigkeiten eines C++-basierten ROS2-Systems ohne manuelle Annotation gefunden und leichter visualisiert werden.
CamRaDepth: Semantic Guided Depth Estimation Using Monocular Camera and Sparse Radar

Da Kameras nur 2D-Bilder ausgeben und aktive Sensoren wie LiDAR oder RADAR nur spärliche Tiefenmessungen erzeugen, müssen informationsreichen Tiefenkarten geschätzt werden. In dieser Software kombinieren wir das Potenzial visueller Transformer indem wir Bilder einer Monocamera, semantische Segmentierungen und die Projektionen von Radarsensoren für eine robuste monokulare Tiefenschätzung fusionieren.
ORB-SLAM3-RGBL

In dieser Arbeit fügen wir dem bekannten ORB-SLAM3 den RGB-L (LiDAR) Modus hinzu. Dies ermöglicht es, LiDAR-Tiefenmessungen direkt in das visuelle SLAM zu integrieren. Auf diese Weise erhalten wir eine Genauigkeit, die einer Stereocamera extrem nahe kommt. Gleichzeitg konnten wir die Berechnungszeiten stark reduzieren.