News from the AVS Lab
New Open-Source Repository: 3D Vehicle State Estimation
New Open-Source Repository for Vehicle Dynamics State Estimation Released
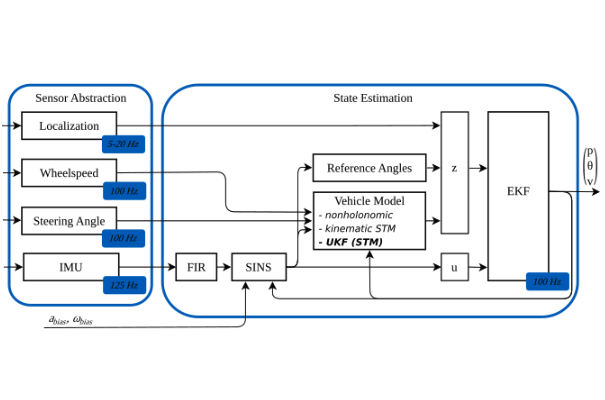
We released a new open-source repository, 3D Vehicle Dynamics State Estimation, which is offering a robust and modular solution for vehicle pose and velocity estimation in autonomous driving applications. Designed to operate seamlessly within a Linux Docker environment and built on ROS2 Humble, the repository provides researchers and developers with advanced state estimation tools.
At its core, the repository implements a 3D Point-Mass-based Extended Kalman Filter (EKF) to estimate vehicle pose (position and orientation) and velocity, ensuring numerical stability and independence from vehicle and tire parameters. The method is further enhanced by integrating velocity estimates from a Single-Track-Model-based Unscented Kalman Filter (UKF), offering improved accuracy and robustness.