
Adaptive learning-based model predictive control strategy for drift vehicles
B. Zhou, C. Hu, J. Zeng, Z. Li, J. Betz, L. Xie, H. Su
Robotics and Autonomous Systems, vol. 188. Elsevier BV, p. 104941, 2025
doi: 10.1016/j.robot.2025.104941, PDF
Kineto-Dynamical Planning and Accurate Execution of Minimum-Time Maneuvers on Three-Dimensional Circuits
M, Piccinini, S, Taddei, J. Betz, F. Biral
IEEE International Conference on Robotics and Automation (ICRA) 2025
doi: , PDF
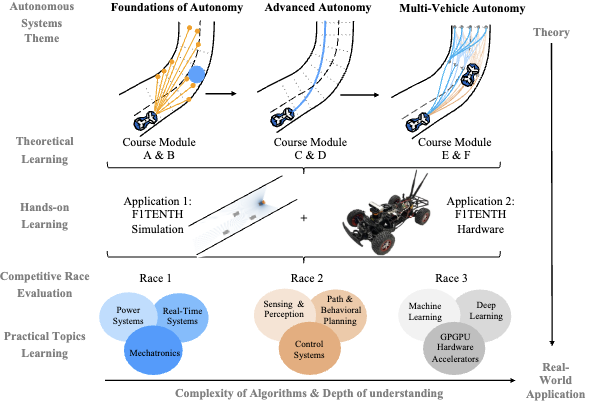
F1TENTH: Enhancing Autonomous Systems Education Through Hands-on Learning and Competition
J. Betz, H. Zheng, Z. Zang, F. Jahncke, F. Sauerbeck, Y. Zehng, J. Biswas, V. Krovi, R. Mangharam
IEEE Transactions on Intelligent Vehicles (T-IV), vol. 73, no. 8, pp. 10916-10931, 2024.
doi: 10.1109/TIV.2024.3495227, PDF, Video, Code
Open-Loop and Feedback Nash Trajectories for Competitive Racing with iLQGames
M. Rowold, A. Langmann, B. Lohmann, J. Betz
IEEE International Conference on Intelligent Transportation Systems (ITSC), 2024
doi: , Paper
FRENETIX: A High-Performance and Modular Motion Planning Framework for Autonomous Driving
R. Trauth, K. Moller, G. Würsching, J. Betz
IEEE Access, vol. 12, pp. 127426–127439, 2024
doi: 10.1109/ACCESS.2024.3436835, PDF, Video, Code
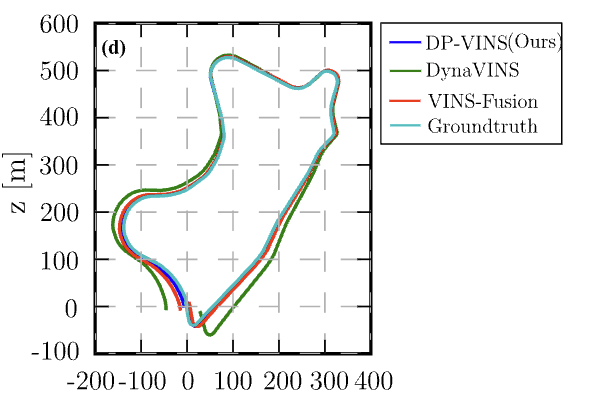
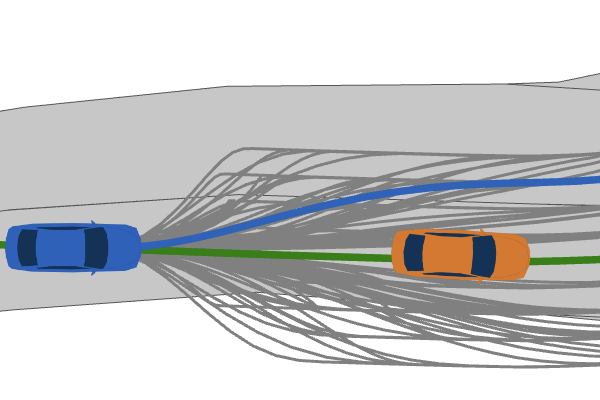
DP-VINS: Dynamics Adaptive Plane-Based Visual-Interatial SLAM
L. Zhang, H. Yin, W. Ye, J. Betz
IEEE Transactions on Instrumentation and Measurement, vol. 73, pp.1-16, 2024, Art no. 5036516, 2024
doi: 10.1109/TIM.2024.3476615, PDF
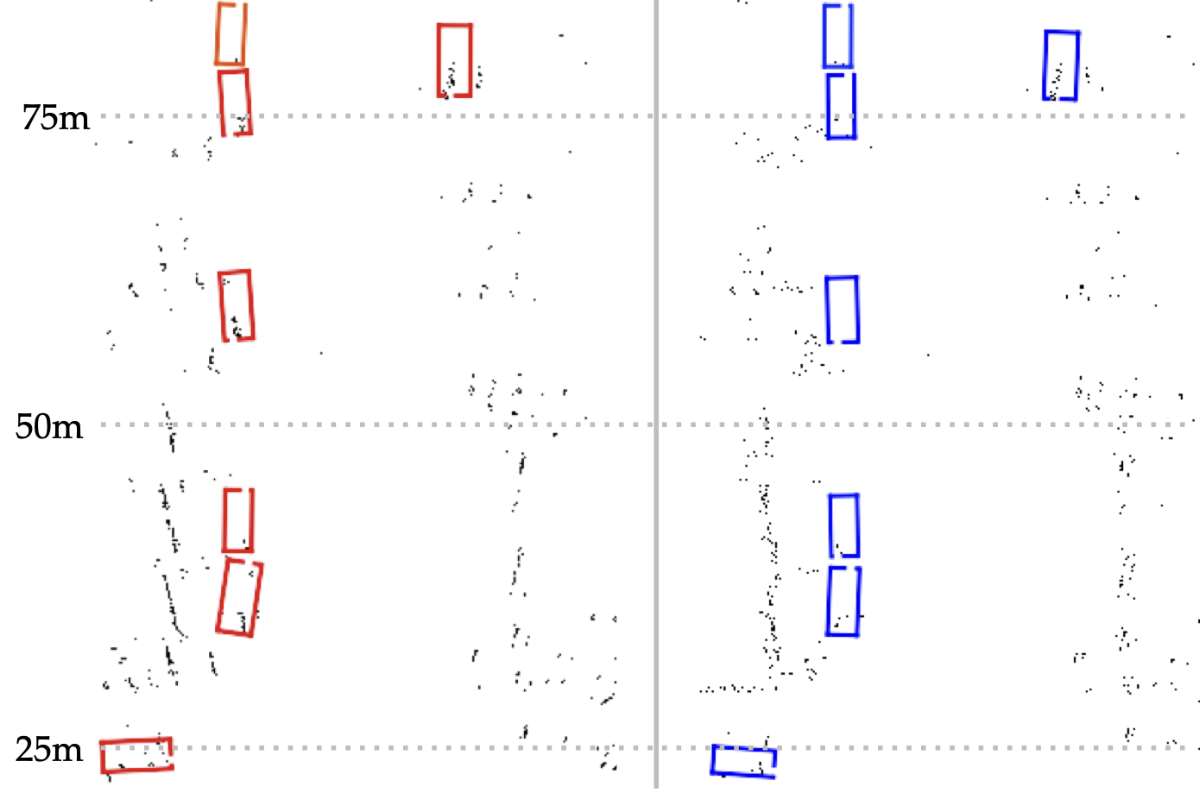
Doppler Beam Sharpening for 3D Object Detection
M. Gudelj, M. Meyer, S. Tomforde, J. Betz
21st European Radar Conference (EuRAD)
doi: 10.23919/EuRAD61604.2024.10734915, PDF
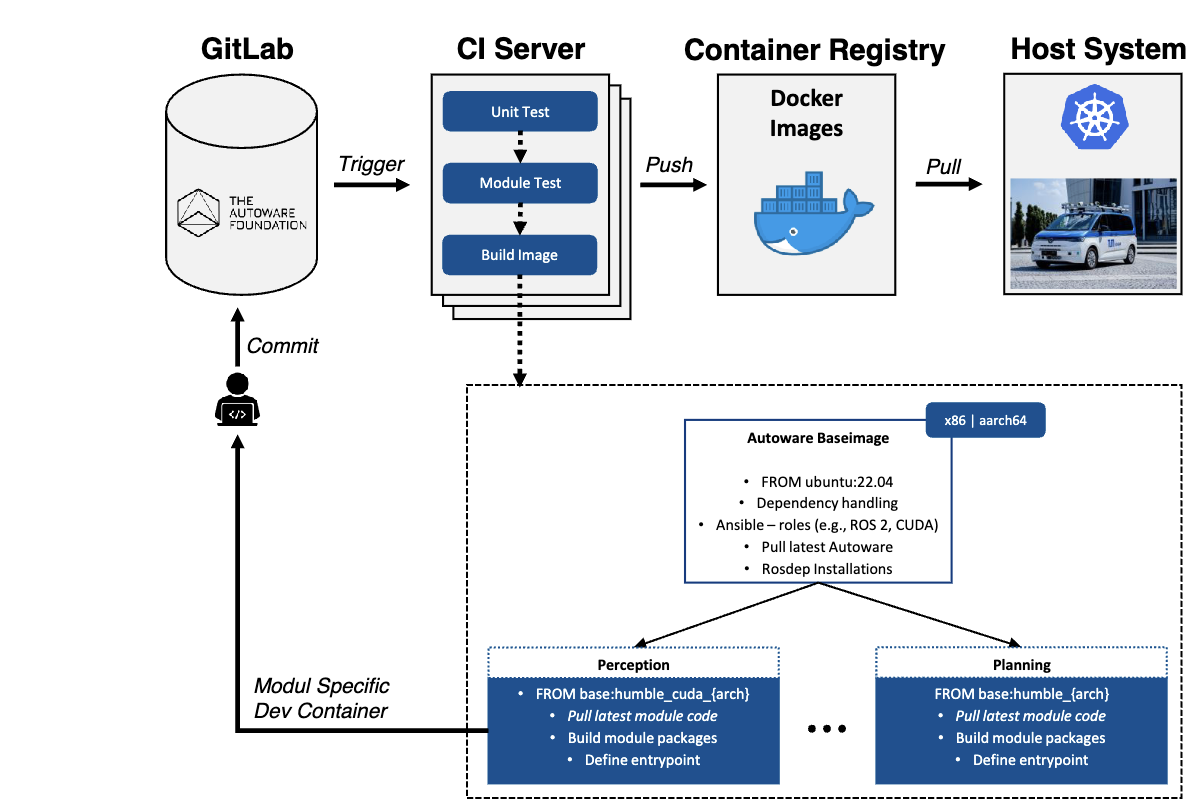
A Containerized Microservice Architecture for a ROS 2 Autonomous Driving Software: An End-to-End Latency Evaluation
T. Betz, L. Wen, F. Pan, G. Kaljavesi, A. Zuepke, A. Bastoni, M. Caccamo, A. Knoll, J. Betz
IEEE 30th International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA)
doi: 10.1109/RTCSA62462.2024.00018, PDF
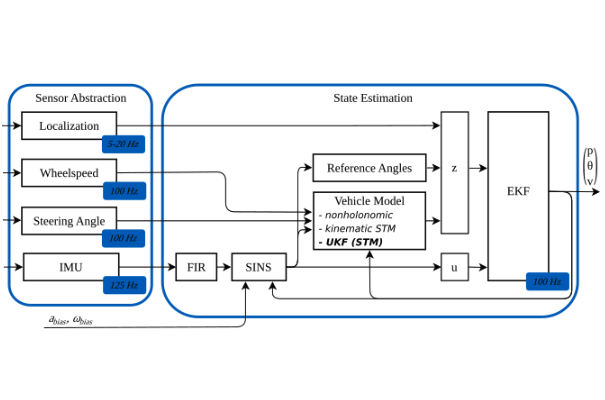
Three-Dimensional Vehicle Dynamics State Estimation for High-Speed Race Cars under varying Signal Quality
S. Goblirsch, M. Weiman, J. Betz
IEEE International Conference on Intelligente Robots and Systems (IROS), 2024
doi: 10.1109/IROS58592.2024.10802776, PDF, Video, Code
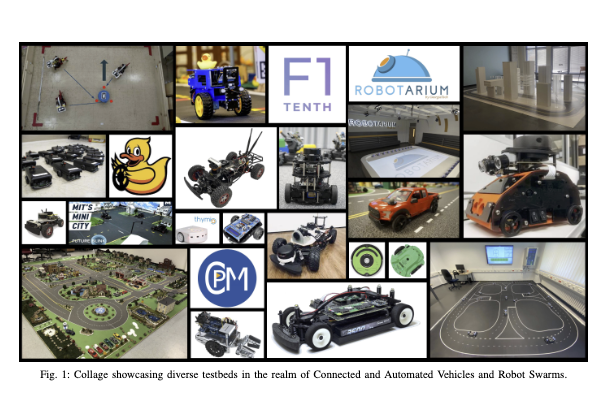
A survey on small-scale testbeds for connected and automated vehicles and robot swarms
A. Mokhtarian, J. Xu, P. Scheffe, M. Kloock, S. Schäfer, H. Bang, V. Le, S. Uhlas, J. Betz, S. Wilson, S. Berman, L. Paull, A. Prorok, B. Alrifaee
IEEE Robotics & Automation Magazin
doi:10.1109/MRA.2024.3505772 , PDF, Paper Website
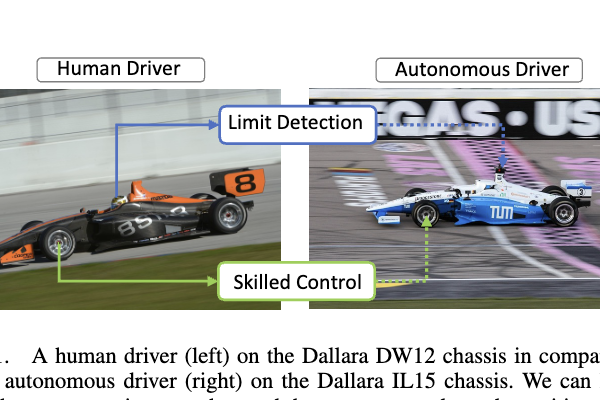
Accelerating Autonomy: Insights from Pro Racers in the Era of Autonomous Racing-An Expert Interview Study
F. Werner, R. Oberhuber, J. Betz
IEEE Intelligent Vehicles Symposium (IV), June 2024
doi: 10.1109/IV55156.2024.10588407, PDF, Code

FlexMap Fusion: Georeferencing and Automated Conflation of HD Maps with OpenStreetMap
M. Leitenstern, F. Sauerbeck, D. Kulmer, J. Betz
IEEE Intelligent Vehicles Symposium (IV), June 2024
doi: 10.1109/IV55156.2024.10588414, PDF, Code
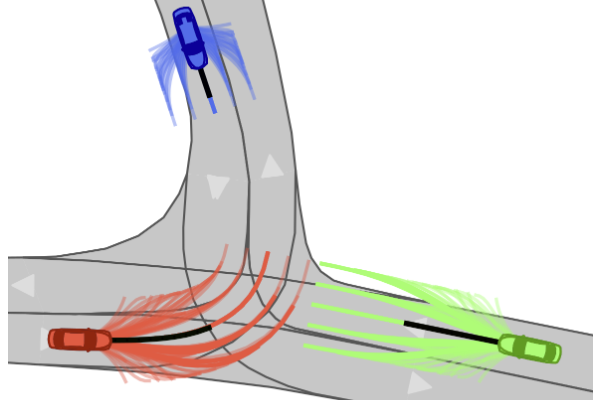
Investigating driving interactions: A robust multi-agent simulation framework for autonomous vehicles
M. Kaufeld, R. Trauth, J. Betz
IEEE Intelligent Vehicles Symposium (IV), June 2024
doi: 10.1109/IV55156.2024.10588423, PDF, Video, Code
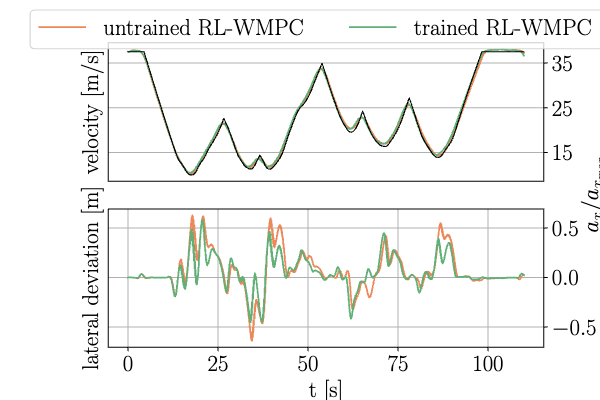
A safe reinforcement learning driven weights-varying model predictive control for autonomous vehicle motion control
B. Zarrouki, M. Spanakakis, J. Betz
IEEE Intelligent Vehicles Symposium (IV), June 2024
doi: 10.1109/IV55156.2024.10588747, PDF, Video, Code
A reinforcement learning-boosted motion planning framework: Comprehensive generalization performance in autonomous driving
R. Trauth, A. Hobmeier, J. Betz
IEEE Intelligent Vehicles Symposium (IV), June 2024
doi: 10.1109/IV55156.2024.10588750, PDF, Code
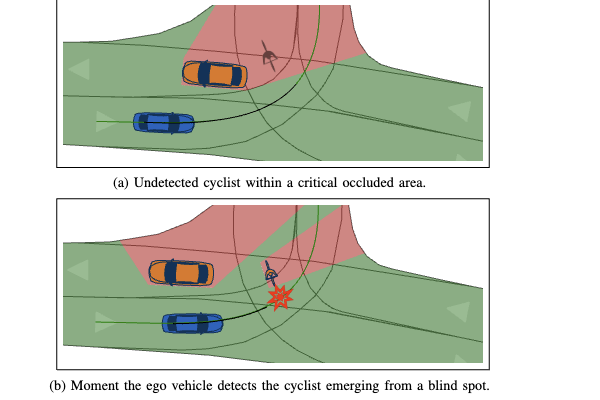
Overcoming blind spots: Occlusion considerations for improved autonomous driving safety
K. Moller, R. Trauth, J. Betz
IEEE Intelligent Vehicles Symposium (IV), June 2024
doi: 10.1109/IV55156.2024.10588481, PDF, Video, Code
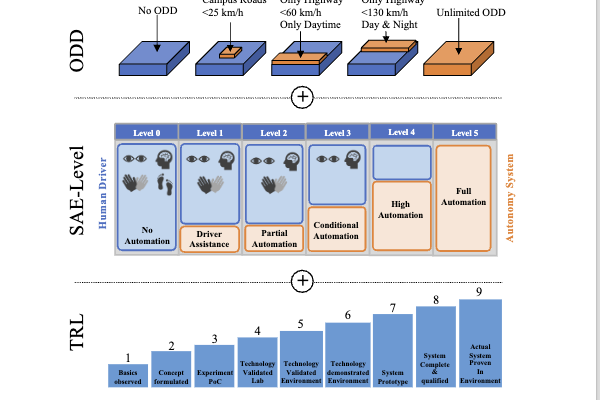
A new Taxonomy for Automated Driving: Structuring Applications based on their Operational Design Domain, Level of Automation and Automation Readiness
J. Betz, M. Lutwitzi, S. Peters
IEEE Intelligent Vehicles Symposium (IV), June 2024
doi: 10.1109/IV55156.2024.10588711, PDF, Video
End-To-End Timing Analysis and Optimization of Multi-Executor ROS 2 Systems
H. Teper, T. Betz, M. Günzel, D. Ebner, G. von der Brüggen, J. Betz, J. Chen
IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS 2024)
doi: 10.1109/RTAS61025.2024.00025, Paper
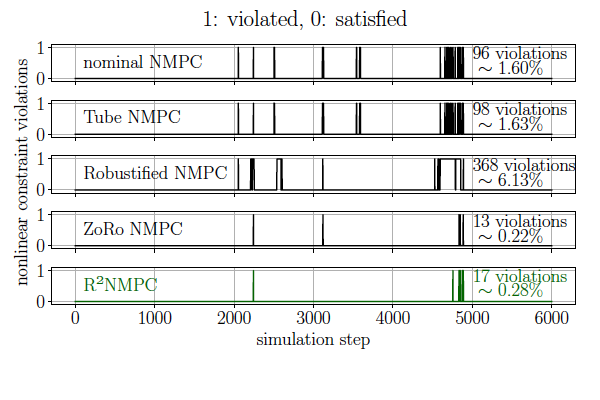
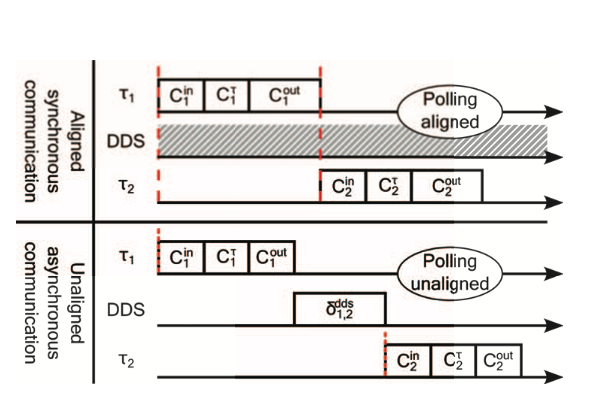
R2NMPC: A Real-Time Reduced Robustified Nonlinear Model Predictive Control with Ellipsoidal Uncertainty Sets for Autonomous Vehicle Motion Control
B. Zarrouki, J. Nunes, J. Betz
8th IFAC Conference on Nonlinear Model Predictive Control (NMPC 2024)
doi: https://doi.org/10.1016/j.ifacol.2024.09.048 , Paper, Video, Code
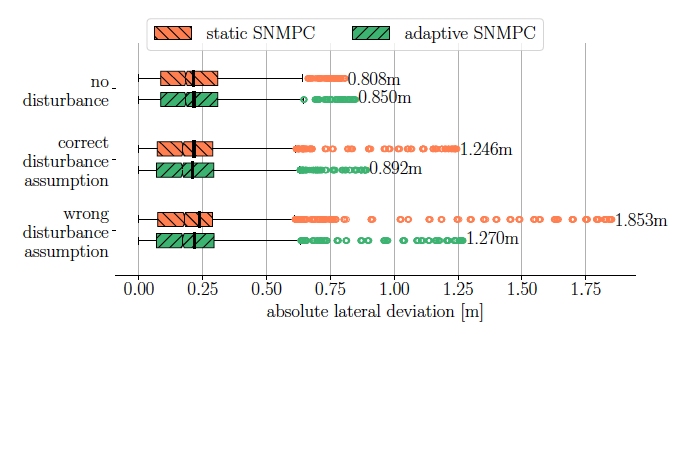
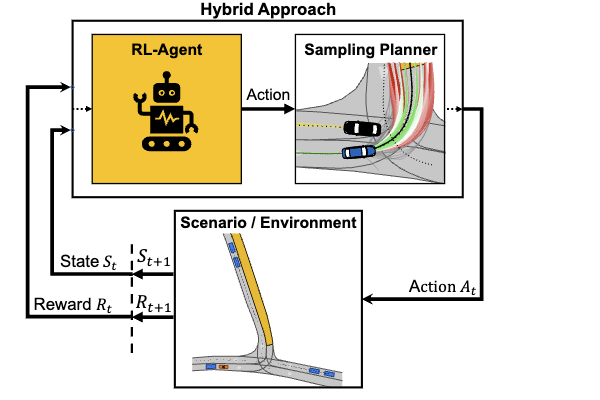
Adaptive Stochastic Nonlinear Model Predictive Control with Look-ahead Deep Reinforcement Learning for Autonomous Vehicle Motion Control
B. Zarrouki, C. Wang, J. Betz
IEEE International Conference on Intelligent Robots and Systems (IROS) 2024
doi: 10.1109/IROS58592.2024.10801876, Paper, Video, Code
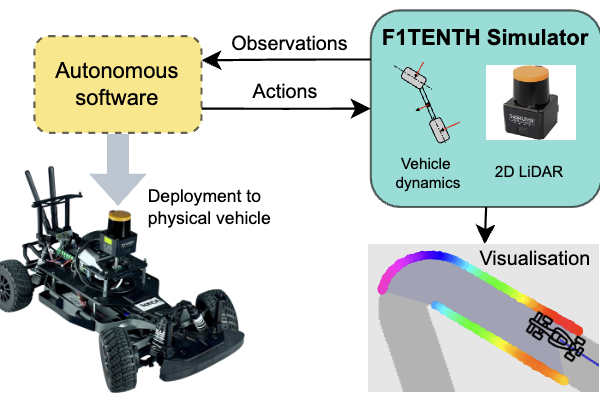
Unifying F1TENTH Autonomous Racing: Survey, Methods and Benchmarks
B. Evans, R. Trumpp, M.Caccamo, F.Jahncke, J. Betz, H. Jordaan, H.Engelbrecht
arXiv Preprint
doi: https://arxiv.org/abs/2402.18558, PDF

Loosely Coupled Stereo VINS Based on Point-Line Features Tracking with Feedback Loops
Z. Linchuan, Y. Huilin, Y. Wei, Y. Jun, Z. Hao, J. Betz
IEEE Transactions on Vehicular Technology
doi: 10.1109/TVT.2024.3370732, PDF

A Stochastic Nonlinear Model Predictive Control with an Uncertainty Propagation Horizon for Autonomous Vehicle Motion Control
B. Zarrouki, C. Wang, J. Betz
IEEE American Control Conference (ACC) 2024
doi: 10.23919/ACC60939.2024.10645032 , Paper, Video, Code

ESP: Extro-Spective Prediction for Long-term Behavior Reasoning in Emergency Scenarios
D. Wang, L. Zheyuan, Y. Li, Y. Wu, Y. Ma, J. Betz, R. Yang, W. Li
IEEE International Conference on Robotics and Automation (ICRA) 2024
doi: 10.1109/ICRA57147.2024.10610002, Paper, Video, Project Website, Dataset

EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application.
P. Karle, T. Betz, M. Bosk, F. Fent, N. Gehrke, M. Geisslinger, L. Gressenbuch, P. Hafemann, S. Huber, M. Hübner, S. Huch, G. Kaljavesi, T. Kerbl, D. Kulmer, T. Mascetta, S. Maierhofer, F. Pfab, F. Rezabek, E. Rivera, S. Sagmeister, L. Seidlitz, F. Sauerbeck, I. Tahiraj, R. Trauth, N. Uhlemann, G. Würsching, B. Zarrouki, M. Althoff, J. Betz, K. Bengler, G. Carle, F. Diermeyer, J. Ott, M. Lienkamp
doi: 10.48550/arXiv.2309.15492, Paper, Video, Code

Auto-tuning Dynamics Parameters of Intelligent Electric Vehicles via Bayesian Optimization
Y. Wang, R. Lian, H. He, J. Betz, and H. Wei
IEEE Transactions on Transportation Electrification, pp. 1–1, 2024
doi: 10.1109/tte.2023.3346874 , Paper

Results of the 2023 CommonRoad Motion Planning Competition for Autonomous Vehicles
N. Kochdumper, Y.n Wang, J.Betz, M. Althoff
arxiv Preprint
doi: arxiv.org/pdf/2411.06425, PDF

Bypassing the Simulation-to-Reality Gap: Online Reinforcement Learning Using a Supervisor
B. D. Evans, J. Betz, H. Zheng, H. A. Engelbrecht, R. Mangharam, and H. W. Jordaan
IEEE 21st International Conference on Advanced Robotics (ICAR)
doi: 10.1109/icar58858.2023.10406465, Paper, Video, Code

Toward Safer Autonomous Vehicles: Occlusion-Aware Trajectory Planning to Minimize Risky Behavior
R. Trauth, K. Moller, and J. Betz
IEEE Open Journal of Intelligent Transportation Systems, vol. 4, pp. 929–942, 2023
doi: 10.1109/ojits.2023.3336464, Paper, Video

Multi-LiDAR Localization and Mapping Pipeline for Urban Autonomous Driving
F.Sauerbeck, D. Kulmer, M. Pielmeier, M. Leitenstern, C. Weiß, J. Betz
IEEE Sensors 2023
doi: 10.1109/sensors56945.2023.10325207, Paper, Video

Timing-Aware ROS2 Architecture and System Optimization
H. Teper, T. Betz, G. Brüggen, K. Chen, J. Betz, J. Chen
IEEE International Conference on Embedded and Real-Time Computing Systems and Applications(RTCSA’23)
doi: 10.1109/RTCSA58653.2023.00032, Paper, Video

Ground-optimized SLAM with Hierarchical Loop Closure Detection in Large-scale Environment
H. Yin, M. Sun, L. Zhang, J. Yan, J. Betz
IEEE International Conference on Intelligent Transportation Systems (ITSC), In Print
doi: 10.1109/ITSC57777.2023.10422438, Paper

Applying ethical theories to the decision-making of self-driving vehicles: A systematic review and integration of the literature
F. Poszler, M. Geisslinger, J. Betz, C. Lütge
Technology in Society, vol. 75. Elsevier BV, p. 102350, Nov. 2023
doi: 10.1016/j.techsoc.2023.102350, PDF, Video

CamRaDepth: Semantic Guided Depth Estimation Using Monocular Camera and Sparse Radar for Automotive Perception
F. Sauerbeck, D. Halperin, L. Connert, J. Betz
IEEE Sensors Journal, pp. 1–1, 2023
doi: 10.1109/jsen.2023.3321886, PDF, Video

Learn to See Fast: Lessons Learned from Autonomous Racing on How to Develop Perception Systems
F. Sauerbeck, S. Huch, F. Fent, P. Karle, D. Kulmer, J. Betz
IEEE Access, pp. 1–1, 2023
doi: 10.1109/access.2023.3272750, PDF

How Fast is My Software? Latency Evaluation for a ROS2 Autonomous Driving Software
T. Betz, M. Schmeller, H. Teper, J. Betz
IEEE Intelligent Vehicle Symposium (IV), June 2023
doi: 10.1109/IV55152.2023.10186585, PDF, Video

Latency Measurement for Autonomous Driving Software Using Data Flow Extraction
T. Betz, M. Schmeller, A. Korb, J. Betz
IEEE Intelligent Vehicle Symposium (IV), June 2023
doi: 10.1109/IV55152.2023.10186686, PDF, Video

DeepSTEP - Deep Learning-Based Spatio-Temporal End-To-End Perception for Autonomous Vehicles
S. Huch, F. Sauerbeck, J. Betz
IEEE Intelligent Vehicles Symposim (IV), June 2023
doi: 10.1109/IV55152.2023.10186768, PDF, Video

A Benchmark Comparison of Imitation Learning-Based Control Policies for Autonomous Racing
X. Sun, M. Zhou, Z. Zhuang, S. Yang, J. Betz, R. Mangharam
IEEE Intelligent Vehicles Symposim (IV), June 2023
doi: 10.1109/IV55152.2023.10186780, PDF

Learning and Adapting Behavior of Autonomous Vehicles Through Inverse Reinforcement Learning
R. Trauth, M. Kaufeld, M. Geisslinger, J. Betz
IEEE Intelligent Vehicles Symposim (IV), June 2023
doi: 10.1109/IV55152.2023.10186668, PDF

RGB-L: Enhancing Indirect Visual SLAM using LiDAR-based Dense Depth Map
F. Sauerbeck, B. Obermeier, M. Rudolph, J. Betz
IEEE 3rd International Conference on Computer, Control and Robotics (ICCCR), March 2023
doi: 10.1109/icccr56747.2023.10194045, PDF

End-to-End Optimization of Autonomous Vehicle Software Parameters
R. Trauth, P. Karle, T. Betz, J. Betz
IEEE 3rd International Conference on Computer, Control and Robotics (ICCCR), March 2023
doi: 10.1109/ICCCR56747.2023.10193889, PDF

Local_INN: Implicit Map Representation and Localization with Invertible Neural Networks
Z. Zang, H. Zheng, J. Betz, R. Mangharam
2023 IEEE International Conference on Robotics and Automation (ICRA), May 2023
doi: 10.1109/ICRA48891.2023.10161015, PDF, Video

An Analysis of Software Latency for a High-Speed Autonomous Race Car – A Case Study in the Indy Autonomous Challenge
T. Betz, P. Karle, F. Werner, J. Betz
SAE International Journal of Connected and Automated Vehicles, vol. 6, no. 3. SAE International, 2023.
doi: 10.4271/12-06-03-0018, PDF

TUM autonomous motorsport: An autonomous racing software for the Indy Autonomous Challenge
J. Betz, T. Betz, F. Fent, M. Geisslinger, A. Heilmeier, L. Hermansdorfer, et al.
Journal of Field Robotics, 1– 27, 2023.
doi: https://doi.org/10.1002/rob.22153, PDF, Video

TireEye: Optical On-board Tire Wear Detection
S. Huber, P. Preindl, and J. Betz
Annual Conference of the PHM Society, vol. 14, no. 1. PHM Society, Oct. 28, 2022.
doi: 10.36001/phmconf.2022.v14i1.3242, PDF

Combinatorial and Parametric Gradient-Free Optimization for Cyber-Physical System Design
H. Zheng, J. Betz, A. Ramamurthy, H. Jin, and R. Mangharam
2022 IEEE Workshop on Design Automation for CPS and IoT (DESTION), May 2022
doi: 10.1109/destion56136.2022.00012, PDF

Indy Autonomous Challenge - Autonomous Race Cars at the Handling Limits
A. Wischnewski, M. Geisslinger, J. Betz, et al.
Pfeffer, P. (eds) 12th International Munich Chassis Symposium 2021. Proceedings. Springer Vieweg, Berlin, Heidelberg., pp. 163–182, 2022
doi: 10.1007/978-3-662-64550-5_10, PDF

Deriving Spatial Policies for Overtaking Maneuvers with Autonomous Vehicles
J. Bhargav, J. Betz, H. Zheng, and R. Mangharam
2022 14th International Conference on COMmunication Systems & NETworkS (COMSNETS), 2022
doi: 10.1109/COMSNETS53615.2022.9668548, PDF

Winning the 3rd Japan Automotive AI Challenge--Autonomous Racing with the Autoware. Auto Open Source Software Stack
Z. Zang, R. Tumu, J. Betz, H. Zheng, R. Mangharam
IEEE Intelligent Vehicles Symposium (IV 22), 2022
Doi: 10.1109/IV51971.2022.9827162, PDF

Wheel Speed Is All You Need: How to Efficiently Detect Automotive Damper Defects Using Frequency Analysis
S. Huber, J. Betz, M. Lienkamp
IEEE Intelligent Vehicles Symposium (IV 22), 2022
doi: 10.1109/IV51971.2022.9827269, PDF

Stress Testing Autonomous Racing Overtake Maneuvers with RRT
S. Bak, J. Betz, A. Chawla, H. Zheng, R. Mangharam
IEEE Intelligent Vehicles Symposium (IV 22), 2022
doi: 10.1109/IV51971.2022.9827237, PDF

Drive Right: Autonomous Vehicle Education through an Integrated Simulation Platform
Z. Qiao, H. Loeb, V. Gurrla, M. Lebermann, J. Betz, and R. Mangharam,
SAE International Journal of Connected and Automated Vehicles, vol. 5, no. 4., Apr. 13, 2022
doi: 10.4271/12-05-04-0028, PDF

Autonomous vehicles on the edge: A survey on autonomous vehicle racing
J. Betz, H. Zheng, A. Liniger, U. Rosolia, P. Karle, M. Behl, V. Krovi, R. Mangharam
IEEE Open Journal of Intelligent Transportation Systems, vol. 3., pp. 458–488 2022
doi: 10.1109/ojits.2022.3181510, PDF

Scenario Understanding and Motion Prediction for Autonomous Vehicles—Review and Comparison
P. Karle, M. Geisslinger, J. Betz, and M. Lienkamp,
IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 10., pp. 16962–16982, Oct. 2022
doi: 10.1109/tits.2022.3156011, PDF

A Combined LiDAR-Camera Localization for Autonomous Race Cars
F. Sauerbeck, L. Baierlein, J. Betz, M. Lienkamp
SAE International Journal of Connected and Automated Vehicles, vol. 5, no. 1, Jan. 2022
doi: 10.4271/12-05-01-0006, PDF

Optimization-Based Real-Time-Capable Energy Strategy for Autonomous Electric Race Cars
T. Herrmann, F. Sauerbeck, M. Bayerlein, J. Betz, and M. Lienkamp
SAE International Journal of Connected and Automated Vehicles, vol. 5, no. 1., pp. 45–59, Jan. 10, 2022
doi: 10.4271/12-05-01-0005, PDF

Watch-and-Learn-Net: Self-supervised Online Learning for Probabilistic Vehicle Trajectory Prediction
M. Geisslinger, P. Karle, J. Betz, and M. Lienkamp, “
IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2021.
doi: 10.1109/smc52423.2021.9659079, PDF

Unified Mobility Estimation Model
D. Ziegler, J. Betz, M. Lienkamp
2021 IEEE International Intelligent Transportation Systems Conference (ITSC), 2021
doi: 10.1109/itsc48978.2021.9564453, PDF

Track based offline policy learning for overtaking maneuvers with autonomous racecars
J. Bhargav, J. Betz, H. Zheng, and R. Mangharam
2021 IEEE International Conference on Robotics and Automation (ICRA 2021) – Workshop Opportunities and Challenges With Autonomous Racing, 2021
doi: arxiv.org/abs/2107.09782, PDF

Radar Voxel Fusion for 3D Object Detection
F. Nobis, E. Shafiei, P. Karle, J. Betz, M. Lienkamp
Applied Sciences, vol. 11, no. 12, p. 5598, 2021
doi: 10.3390/app11125598, PDF

Autonomous Driving Ethics: from Trolley Problem to Ethics of Risk
M. Geisslinger, F. Poszler, J. Betz, C. Luetge and M. Lienkamp
Philosophy & Technology, vol. 34, no. 4. Springer Science and Business Media LLC, pp. 1033–1055, Apr. 12, 2021
doi: 10.1007/s13347-021-00449-4, PDF

Kernel Point Convolution LSTM Networks for Radar Point Cloud Segmentation
F. Nobis, F. Fent, J. Betz, and M. Lienkamp
Applied Sciences, vol. 11, no. 6, p. 2599, 2021
doi: 10.3390/app11062599, PDF

Multi-Task End-to-End Self-Driving Architecture for CAV Platoons
S. Huch, A. Ongel, J. Betz, and M. Lienkamp
Sensors, vol. 21, no. 4, p. 1039, 2021
doi: 10.3390/s21041039, PDF

Real-Time Adaptive Velocity Optimization for Autonomous Electric Race Cars
T. Herrmann, A. Wischnewski, L. Hermansdorfer, J. Betz, M. Lienkamp
IEEE Transactions on Intelligent Vehicles, vol. 6, no. 4., pp. 665–677, Dec. 2021
doi: 10.1109/TIV.2020.3047858, PDF

Virtual Strategy Engineer: Using Artificial Neural Networks for Making Race Strategy Decisions in Circuit Motorsport
A. Heilmeier, A. Thomaser, M. Graf, J. Betz
Applied Sciences, vol. 10, no. 21, p. 7805, Nov. 2020
doi: 10.3390/app10217805, PDF

Application of Monte Carlo Methods to Consider Probabilistic Effects in a Race Simulation for Circuit Motorsport
A. Heilmeier, M. Graf, J. Betz, M. Lienkamp
Applied Sciences, vol. 10, no. 12, p. 4229, Jun. 2020
doi: 10.3390/app10124229, PDF

End-to-End Neural Network for Vehicle Dynamics Modeling – Best Paper Award
L. Hermansdorfer, R. Trauth, J. Betz, M. Lienkamp
3rd IEEE Conference on Optimization and Modeling of Complex Systems, Agadir, Morocco, December 2020, 2020
doi: 10.1109/cist49399.2021.9357196, PDF

Real-Time Learning of Non-Gaussian Uncertainty Models for Autonomous Racing
A. Wischnewski, J. Betz, and B. Lohmann
2020 59th IEEE Conference on Decision and Control (CDC), 2020
doi: 10.1109/cdc42340.2020.9304230, PDF

Techno-Economic Analysis of State-of-the-Art Charging Infrastructure Concepts for Typical Commercial Battery Electric Vehicle Fleets
A. Waclaw, F. Gotzler, J. Betz
2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), 2020
doi: 10.1109/itsc45102.2020.9294197, PDF

Online Verification Concept for Autonomous Vehicles – Illustrative Study for a Trajectory Planning Module
T. Stahl, M. Eicher, J. Betz, and F. Diermeyer
2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), 2020
doi: 10.1109/ITSC45102.2020.9294703, PDF

Exploring the Capabilities and Limits of 3D Monocular Object Detection – A Study on Simulation and Real World Data
F. Nobis, F. Brunhuber, S. Janssen, J. Betz, and M. Lienkamp
2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), 2020
doi: 10.1109/ITSC45102.2020.9294625, PDF

Minimum Race-Time Planning-Strategy for an Autonomous Electric Racecar
T. Herrmann, F. Passigato, J. Betz, and M. Lienkamp
2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), 2020
doi: 10.1109/ITSC45102.2020.9294681, PDF

An Open-Source Scenario Architect for Autonomous Vehicles
T. Stahl and J. Betz
2020 Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), 2020
doi: 10.1109/ever48776.2020.9243029, PDF

Persistent Map Saving for Visual Localization for Autonomous Vehicles: An ORB-SLAM 2 Extension
F. Nobis, O. Papanikolaou, J. Betz, and M. Lienkamp
2020 Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), 2020
doi: 10.1109/ever48776.2020.9243094, PDF

Importance of Contextual Information for the Detection of Road Damages
K. Riedl, S. Huber, M. Bomer, J. Kreibich, F. Nobis, and J. Betz
2020 Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), 2020
doi: 10.1109/ever48776.2020.9242954, PDF

Benchmarking of a software stack for autonomous racing against a professional human race driver
L. Hermansdorfer, J. Betz, and M. Lienkamp
2020 Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), 2020
doi: 10.1109/ever48776.2020.9242926, PDF

A Deep Learning-based Radar and Camera Sensor Fusion Architecture for Object Detection
F. Nobis, M. Geisslinger, M. Weber, J. Betz, and M. Lienkamp
2019 Sensor Data Fusion: Trends, Solutions, Applications (SDF), 2019
doi: 10.1109/SDF.2019.8916629, PDF

A Software Architecture for the Dynamic Path Planning of an Autonomous Racecar at the Limits of Handling
J. Betz, A. Wischnewski, A. Heilmeier, F. Nobis, T. Stahl, L. Hermansdorfer, T. Herrmann, M. Lienkamp
2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), 2019
doi: 10.1109/ICCVE45908.2019.8965238, PDF

A Model-Free Algorithm to Safely Approach the Handling Limit of an Autonomous Racecar
A. Wischnewski, J. Betz, and B. Lohmann
2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), 2019
doi: 10.1109/ICCVE45908.2019.8965218, PDF

Energy Management Strategy for an Autonomous Electric Racecar using Optimal Control
T. Herrmann, F. Christ, J. Betz, and M. Lienkamp
2019 IEEE Intelligent Transportation Systems Conference – ITSC, 2019
doi: 10.1109/ITSC.2019.8917154, PDF

A Concept for Estimation and Prediction of the Tire-Road Friction Potential for an Autonomous Racecar
L. Hermansdorfer, J. Betz, and M. Lienkamp
2019 IEEE Intelligent Transportation Systems Conference – ITSC, 2019
doi: 10.1109/ITSC.2019.8917024, PDF

Multilayer Graph-Based Trajectory Planning for Race Vehicles in Dynamic Scenarios
T. Stahl, A. Wischnewski, J. Betz, and M. Lienkamp
2019 IEEE Intelligent Transportation Systems Conference – ITSC, 2019
doi: 10.1109/itsc.2019.8917032, PDF

Autonomous Driving—A Crash Explained in Detail
J. Betz, A. Heilmeier, A. Wischnewski, T. Stahl and M. Lienkamp
Applied Sciences, vol. 9, no. 23, p. 5126, 2019
doi: 10.3390/app9235126, PDF

SemanticDepth: Fusing Semantic Segmentation and Monocular Depth Estimation for Enabling Autonomous Driving in Roads without Lane Lines
P. R. Palafox, J. Betz, F. Nobis, K. Riedl, and M. Lienkamp
Sensors, vol. 19, no. 14, p. 3224, 2019
doi: 10.3390/s19143224, PDF
Minimum curvature trajectory planning and control for an autonomous race car
A. Heilmeier, A. Wischnewski, L. Hermansdorfer, J. Betz, M. Lienkamp, B. Lohmann
Vehicle System Dynamics, vol. 58, no. 10, pp. 1497–1527, 2019
doi: 10.1080/00423114.2019.1631455, PDF
Vehicle Dynamics State Estimation and Localization for High Performance Race Cars – Young Author Award
A. Wischnewski, T. Stahl, J. Betz, and B. Lohmann
IFAC-PapersOnLine, vol. 52, no. 8, pp. 154–161, 2019
doi: 10.1016/j.ifacol.2019.08.064, PDF
Road Network Coverage Models for Cloud-based Automotive Applications: A Case Study in the City of Munich
K. Riedl, S. Kurscheid, A. Noll, J. Betz, and M. Lienkamp
2019 IEEE Intelligent Vehicles Symposium (IV), 2019
doi: 10.1109/IVS.2019.8814020, PDF
Techno-Economical Implementation of Holistic Electromobility Solutions in Commercial Companies
A. Waclaw, J. Betz, M. Lienkamp
2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), 2019
doi: 10.1109/EVER.2019.8813533, PDF
A Quasi-Steady-State Lap Time Simulation for Electrified Race Cars
A. Heilmeier, M. Geisslinger, and J. Betz
2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), 2019
doi: 10.1109/EVER.2019.8813646, PDF
A Software Architecture for an Autonomous Racecar
T. Stahl, A. Wischnewski, J. Betz, and M. Lienkamp
2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), 2019
doi: 10.1109/VTCSpring.2019.8746367, PDF
ROS-based localization of a race vehicle at high-speed using LIDAR
T. Stahl, A. Wischnewski, J. Betz, and M. Lienkamp
E3S Web of Conferences, 2019
doi: 10.1051/e3sconf/20199504002, PDF
Autonomous Racing: A Comparison of SLAM Algorithms for Large Scale Outdoor Environments
F. Nobis, J. Betz, L. Hermansdorfer, and M. Lienkamp
ICVARS ’19: 2019 the 3rd International Conference on Virtual and Augmented Reality Simulations, 2019
doi: 10.1145/3332305.3332319, PDF
2018
What can we learn from autonomous level 5 Motorsport?
J. Betz, A. Wischnewski, A. Heilmeier, F. Nobis, T. Stahl, L. Hermansdorfer, B. Lohmann M. Lienkamp
Proceedings, Springer Fachmedien Wiesbaden, 2018
doi: 10.1007/978-3-658-22050-1_12, PDF
2017
A Holistic Framework for Acquisition, Processing and Evaluation of Vehicle Fleet Test Data
M. Wittmann, L. Lohrer, J. Betz, B. Jäger, M. Ott, M. Klöppel, M. Hann, M. Lienkamp
IEEE International Conference on Intelligent Transportation Systems (ITSC 17), 2017
doi: 10.1109/ITSC.2017.8317637, PDF
Analysis of the Charging Infrastructure for Battery Electric Vehicles in Commercial Companies
J. Betz, L. Walther, M. Lienkamp
IEEE Intelligent Vehicle Symposium (IV 17), 2017
doi: 10.1109/IVS.2017.7995945, PDF
Evaluation of the Potential of Integrating Battery Electric Vehicles into Commercial Companies on the Basis of Fleet Test Data
J. Betz, M. Hann, B. Jäger, M. Lienkamp
2017 IEEE 85th Vehicular Technology Conference (VTC Spring), 2017
doi: 10.1109/VTCSpring.2017.8108289, PDF
An evaluation of the car-free city potential for the city of Munich regarding mobility data
J. Betz, S. Prottung, and M. Lienkamp
2017 Twelfth International Conference on Ecological Vehicles and Renewable Energies (EVER), 2017
doi: 10.1109/ever.2017.7935875, PDF
2016
Evaluation of the potential of integrating battery electric vehicles into the energy structure of a commercial company
J. Betz, T. Scholz, and M. Lienkamp
2016 IEEE Smart Energy Grid Engineering (SEGE), 2016
doi: 10.1109/sege.2016.7589541, PDF
Fleet disposition modeling to maximize utilization of battery electric vehicles in companies with on-site energy generation
J. Betz, D. Werner, M. Lienkamp
Transportation Research Procedia, 2016
doi: 10.1016/j.trpro.2016.12.084, PDF
Approach for the development of a method for the integration of battery electric vehicles in commercial companies, including intelligent management systems
J. Betz and M. Lienkamp
Automot. Engine Technol., vol. 1, no. 1–4, pp. 107–117, 2016
doi: 10.1007/s41104-016-0008-y, PDF
2014
EE-Architektur für mobile Dienste
T. Tang, D. Soto-Setzke, C. Kohl, T. Köhn, J. Lohrer, and J. Betz
ATZ Extra, vol. 19, no. 14, pp. 40–45, 2014
doi: 10.1365/s35778-014-1356-8, PDF