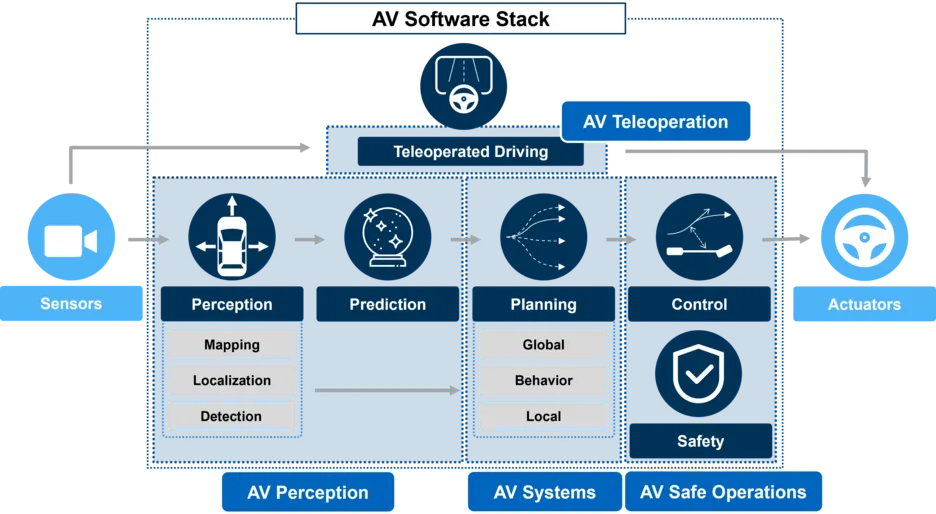
Our goal is the development of modular algorithms for autonomous driving with the aim of an optimal and consistent overall software and the application under real conditions, which we pursue through a software structure on standardized interfaces as well as a comprehensive simulation environment and testing in the research vehicle.
Team AV Planning & Control
Contact: Professorship Autonomous Vehicle Systems (AVS), Prof. Dr. Johannes Betz

