OBACHT: Smart Public Transport Infrastructure Control System
Project Description
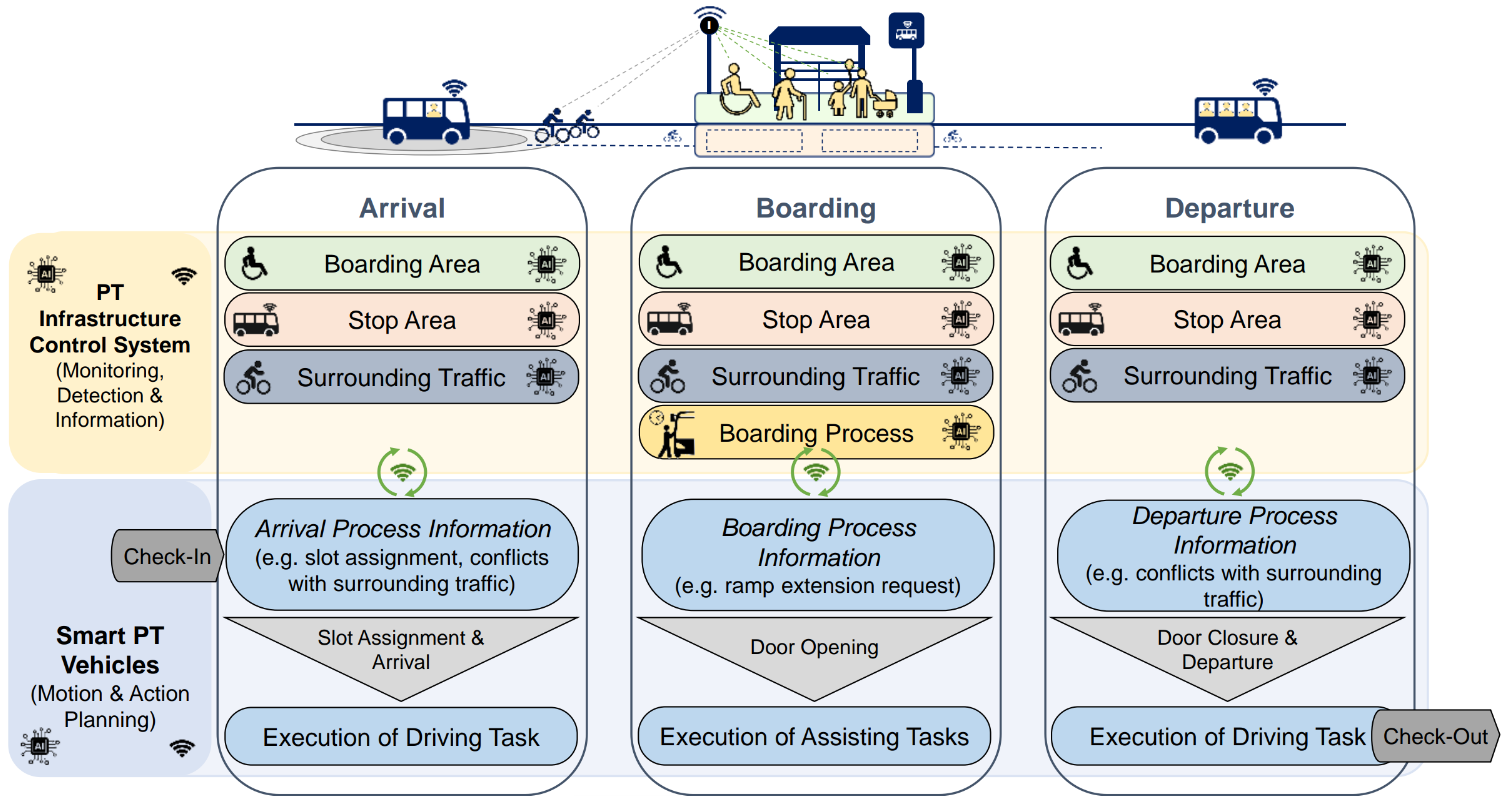
Motivated by the fast developments in vehicle technology, such as automation and connectivity, this project explores the future of automated public transport (PT) systems in urban areas. Despite the absence of human vehicle drivers in fully automated PT systems, high safety requirements given by legal requirements must be met in every possible situation as well as the obligation to transport any passenger regardless of their physical or cognitive limitations. Especially in the arrival, boarding and departure process at PT stops, there is a wide range of situations, in which nowadays the human vehicle driver must intervene (e.g. stop skipping, ramp extension or other boarding aid for mobility-restricted passengers, avoidance of conflicts with other traffic modes).
By systematically analyzing and characterizing PT infrastructure, safety-critical situations at PT stops as well as current obligations of PT vehicle drivers, experiments will be designed and conducted in a controlled test environment (TUM test bed for automated and connected urban driving) that will reveal limitations of exclusively vehicle-based functionalities. An AI-enhanced, infrastructure-based control system will be developed to counteract these limitations and meet the stringent regulatory requirements. Furthermore, effects on overall traffic safety, efficiency and accessibility of PT systems will be evaluated and incorporated into recommendations for public policy making, the renewal of existing PT infrastructure design guidelines, PT operators and industry.
Tasks of the Chair:
- Analysis of current (non-automated) public transport systems
- Definition of requirements, use cases and experimental designs
- Concept, design and simulative pre-testing of a PT Infrastructure Control System
- Experimental Testing and Evaluation of possible impacts on the overall traffic system
- Dissemination and elaboration of recommendations
| Keywords | automated public transport; public transport infrastructure planning; traffic safety, efficiency & accessibility assessment; traffic rule compliant action planning; benchmarking of automated driving functions; temporal logics |
| Funding | TUM Georg Nemetschek Institut – Artificial Intelligence for the Built World |
| Website | https://www.mdsi.tum.de/gni/gni-funded-projects/obacht/ |
| Partners | TUM – Professorship für Cyber Physical Systems (Prof. Althoff) |
| Duration | 48 Months (01.2024 – 01.2028) |
| Contact | Mario Ilic , Johannes Lindner |