Werde Teil des EDGAR-Teams und forsche mit uns anwendungnah am autonomen Fahren von morgen. Wir bieten sowhol Doktorandenstellen als auch unterschiedlichste Möglichkeiten für Studenten.
Die Idee
Im Stand der Wissenschaft existieren bereits eine Vielzahl an Algorithmen, die sich auf die einzelnen Teilaufgaben des autonomen Fahrens wie Bilderkennung oder Fahrzeuglängsregelung fokussieren. Die große Herausforderung besteht jedoch nach wie vor darin aus den einzelnen Modulen eine optimale Gesamtsoftware für die autonome Fahraufgabe zu entwickeln. Durch die Anwendung der einzelnen funktionalen Module in der Gesamtsoftware ergeben sich neue Abhängigkeiten und verkettete Effekte. Zudem kommen die harten Randbedingungen beschränkter Rechenkapazität im Fahrzeug und möglichst niedriger Latenzen zum Tragen. Unser Forschungsschwerpunkt liegt auf eben dieser Gesamtsoftwarebetrachtung mit dem Ziel der realen Anwendung auf der Zielhardware. Dadurch können wir die kritischen Module in der Software und die intermodale Sensitivität genau spezifizieren und Forschungsthemen ableiten, die sich direkt auf ein spezifisches anwendungsrelevantes Problem beziehen.
Die Anwendung der entwickelten Software unter realen Bedingung erfolgt dabei auf einem Level-5 fähigen Forschungsfahrzeug, das mit umfangreicher Sensorik zur Erfassung der Umgebung und des eigenen Fahrzeugzustands, Hochleistungsrechnern zur Anwendung der Software sowie Schnittstellen zur Ansteuerung der Längs- und Querführung ausgerüstet ist. Zudem sind die Hochleistungscomputer baugleich in eine umfangreiche Simulationsumgebung eingebettet, welche während der gesamten Entwicklungsphase und für das automatisierte Abtesten der Softwarefunktionalität im Vorlauf von Realfahrzeugtests genutzt wird. Das Forschungsfahrzeug inkl. Datencenter und Simulator sind durch einen Großgeräteantrag der Deutschen Forschungsgemeinschaft (DFG) gefördert (Bewilligung nach Art. 91b GG mit DFG-Aktenzeichen INST 95/1653-1 FUGG).
Das Ziel
Unser Ziel ist stets die spezifische anwendungsgetriebene Weiterentwicklung bestehender Algorithmen mit Hinblick auf die optimale Gesamtsoftware. Hierfür suchen wir uns komplexe, ausgewählte Anwendungsgebiete (operation design domain, ODD), die wir zur Demonstration unsere Softwarefunktionalität und zur finalen Validierung unserer Entwicklungsarbeiten nutzen. Unsere nächste Ziel-ODD in denen wir Fahrten mit unserem Entwicklungsfahrzeug und der entwickelten Software darstellen wollen sind dabei urbane Szenarien in innerstädtischen Verkehr von München sowie Hub-to-Hub Autobahnfahrten. Trotz der spezifizierten Ziel-ODD verfolgen wir stets das Ziel der Entwicklung einer möglichst generischen Gesamtsoftware, welche auf verschiedene Verkehrsteilnehmer, Straßengeometrien, Geschwindigkeitsbereiche und Wetterbedingungen angewandt werden kann. Die umfangreiche Sensorik des Forschungsfahrzeugs soll zudem für den Aufbau eines multimodalen Datensatzes verwendet werden, der veröffentlicht wird und die Entwicklungsaktivitäten unterstützen soll.
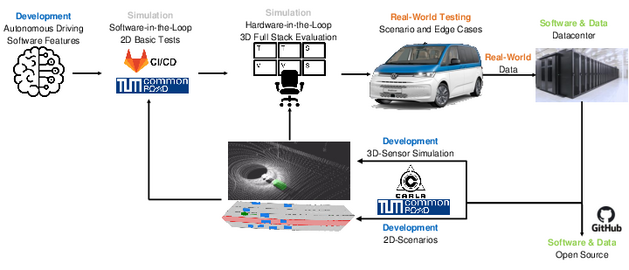
Development Workflow
Das Team
Der FTM verfolgt das Ziel die Kernkompetenzen verschiedener Lehrstühle in diesem Projekt gemeinsam zu bündeln und Synergien in Entwicklung und Anwendung der Forschungsinhalte zu schaffen. Stellvertretend sind vom Lehrstuhl für Fahrzeugtechnik aktuell folgende Mitarbeiten involviert:
Trauth, Rainer; Moller, Korbinian; Würsching, Gerald; Betz, Johannes: FRENETIX: A High-Performance and Modular Motion Planning Framework for Autonomous Driving. IEEE Access, 2024, 1-1 mehr…
2023
Betz, Johannes; Betz, Tobias; Fent, Felix; Geisslinger, Maximilian; Heilmeier, Alexander; Hermansdorfer, Leonhard; Herrmann, Thomas; Huch, Sebastian; Karle, Phillip; Lienkamp, Markus; Lohmann, Boris; Nobis, Felix; Ögretmen, Levent; Rowold, Matthias; Sauerbeck, Florian; Stahl, Tim; Trauth, Rainer; Werner, Frederik; Wischnewski, Alexander: TUM autonomous motorsport: An autonomous racing software for the Indy Autonomous Challenge. Journal of Field Robotics, 2023 mehr…
Betz, Tobias; Karle, Phillip; Werner, Frederik; Betz, Johannes: An Analysis of Software Latency for a High-Speed Autonomous Race Car—A Case Study in the Indy Autonomous Challenge. SAE International Journal of Connected and Automated Vehicles 6 (3), 2023 mehr…
Betz, Tobias; Schmeller, Maximilian; Korb, Andreas; Betz, Johannes: Latency Measurement for Autonomous Driving Software Using Data Flow Extraction. 2023 IEEE Intelligent Vehicles Symposium (IV), IEEE, 2023 mehr…
Betz, Tobias; Schmeller, Maximilian; Teper, Harun; Betz, Johannes: How Fast is My Software? Latency Evaluation for a ROS 2 Autonomous Driving Software. 2023 IEEE Intelligent Vehicles Symposium (IV), IEEE, 2023 mehr…
Geisslinger, Maximilian; Poszler, Franziska; Lienkamp, Markus: An ethical trajectory planning algorithm for autonomous vehicles. Nature Machine Intelligence, 2023 mehr…
Huch, Sebastian; Lienkamp, Markus: Towards Minimizing the LiDAR Sim-to-Real Domain Shift: Object-Level Local Domain Adaptation for 3D Point Clouds of Autonomous Vehicles. Sensors 23 (24), 2023, 9913 mehr…
Huch, Sebastian; Scalerandi, Luca; Rivera, Esteban; Lienkamp, Markus: Quantifying the LiDAR Sim-to-Real Domain Shift: A Detailed Investigation Using Object Detectors and Analyzing Point Clouds at Target-Level. IEEE Transactions on Intelligent Vehicles, 2023, 1-14 mehr…
Sauerbeck, Florian; Halperin, Dan; Connert, Lukas; Betz, Johannes: CamRaDepth: Semantic Guided Depth Estimation Using Monocular Camera and Sparse Radar for Automotive Perception. IEEE Sensors Journal 23 (22), 2023, 28442-28453 mehr…
Sauerbeck, Florian; Huch, Sebastian; Fent, Felix; Karle, Phillip; Kulmer, Dominik; Betz, Johannes: Learn to See Fast: Lessons Learned From Autonomous Racing on How to Develop Perception Systems. IEEE Access 11, 2023, 44034-44050 mehr…
Sauerbeck, Florian; Obermeier, Benjamin; Rudolph, Martin; Betz, Johannes: RGB-L: Enhancing Indirect Visual SLAM Using LiDAR-Based Dense Depth Maps. 2023 3rd International Conference on Computer, Control and Robotics (ICCCR), IEEE, 2023 mehr…
Trauth, Rainer; Karle, Phillip; Betz, Tobias; Betz, Johannes: An End-to-End Optimization Framework for Autonomous Driving Software. 2023 3rd International Conference on Computer, Control and Robotics (ICCCR), IEEE, 2023 mehr…
Trauth, Rainer; Kaufeld, Marc; Geisslinger, Maximilian; Betz, Johannes: Learning and Adapting Behavior of Autonomous Vehicles through Inverse Reinforcement Learning. 2023 IEEE Intelligent Vehicles Symposium (IV), IEEE, 2023 mehr…
Trauth, Rainer; Moller, Korbinian; Betz, Johannes: Toward Safer Autonomous Vehicles: Occlusion-Aware Trajectory Planning to Minimize Risky Behavior. IEEE Open Journal of Intelligent Transportation Systems 4, 2023, 929-942 mehr…
2022
Dwivedi, Tanay; Betz, Tobias; Sauerbeck, Florian; Manivannan, Pv; Lienkamp, Markus: Continuous Control of Autonomous Vehicles using Plan-assisted Deep Reinforcement Learning. 2022 22nd International Conference on Control, Automation and Systems (ICCAS), IEEE, 2022 mehr…
Herrmann, Thomas; Sauerbeck, Florian; Bayerlein, Maximilian; Betz, Johannes; Lienkamp, Markus: Optimization-Based Real-Time-Capable Energy Strategy for Autonomous Electric Race Cars. SAE International Journal of Connected and Automated Vehicles 5 (1), 2022 mehr…
Karle, Phillip; Geisslinger, Maximilian; Betz, Johannes; Lienkamp, Markus: Scenario Understanding and Motion Prediction for Autonomous Vehicles - Review and Comparison. IEEE Transactions on Intelligent Transportation Systems, 2022, 1-21 mehr…
Sauerbeck, Florian; Baierlein, Lucas; Betz, Johannes; Lienkamp, Markus: A Combined LiDAR-Camera Localization for Autonomous Race Cars. SAE International Journal of Connected and Automated Vehicles 5 (1), 2022 mehr…
Passigato, Francesco; Wischnewski, Alexander; Gordner, Achim; Diermeyer, Frank: Two Approaches for the Synthesis of a Weave-Wobble-stabilizing Controller in Motorcycles. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), IEEE, 2021 mehr…
Tobias, Betz; Fujiishi, Hidehito; Kobayashi, Taisuke: Behavioral Cloning from Observation with Bi-directional Dynamics Model. 2021 IEEE/SICE International Symposium on System Integration (SII), IEEE, 2021 mehr…
2020
Heilmeier, Alexander; Wischnewski, Alexander; Hermansdorfer, Leonhard; Betz, Johannes; Lienkamp, Markus; Lohmann, Boris: Minimum curvature trajectory planning and control for an autonomous race car. Vehicle System Dynamics 58 (10), 2020, 1497-1527 mehr…
Hermansdorfer, Leonhard; Trauth, Rainer; Betz, Johannes; Lienkamp, Markus: End-to-End Neural Network for Vehicle Dynamics Modeling. 2020 6th IEEE Congress on Information Science and Technology (CiSt), IEEE, 2020 mehr…
Herrmann, Thomas; Wischnewski, Alexander; Hermansdorfer, Leonhard; Betz, Johannes; Lienkamp, Markus: Real-Time Adaptive Velocity Optimization for Autonomous Electric Cars at the Limits of Handling. IEEE Transactions on Intelligent Vehicles, 2020, 1-1 mehr…
2019
Betz, Johannes; Wischnewski, Alexander; Heilmeier, Alexander; Nobis, Felix; Hermansdorfer, Leonhard; Stahl, Tim; Herrmann, Thomas; Lienkamp, Markus: A Software Architecture for the Dynamic Path Planning of an Autonomous Racecar at the Limits of Handling. 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), IEEE, 2019 mehr…
Heilmeier, Alexander; Geisslinger, Maximilian; Betz, Johannes: A Quasi-Steady-State Lap Time Simulation for Electrified Race Cars. 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), IEEE, 2019 mehr…
Nobis, Felix; Geisslinger, Maximilian; Weber, Markus; Betz, Johannes; Lienkamp, Markus: A Deep Learning-based Radar and Camera Sensor Fusion Architecture for Object Detection. 2019 Sensor Data Fusion: Trends, Solutions, Applications (SDF), IEEE, 2019 mehr…
Stahl, Tim; Wischnewski, Alexander; Betz, Johannes; Lienkamp, Markus: ROS-based localization of a race vehicle at high-speed using LIDAR. E3S Web of Conferences 95, 2019, 04002 mehr…
Stahl, Tim; Wischnewski, Alexander; Betz, Johannes; Lienkamp, Markus: Multilayer Graph-Based Trajectory Planning for Race Vehicles in Dynamic Scenarios. 2019 IEEE Intelligent Transportation Systems Conference (ITSC), IEEE, 2019 mehr…