Synchrone Fahrzustands- und Fahrzeugparameterschätzung zur Verbesserung modellbasierter Fahrdynamikregelsysteme
Projekt Abgeschlossen - Ansprechpartner: ftm(at)ed.tum.de
Motivation
Aktuelle Entwicklungen im Bereich von Elektrokleinfahrzeugen zielen unter Anderem auf ein im Vergleich zu konventionellen Fahrzeugen bedeutend niedrigeres Leergewicht ab. Dies hat zur Folge, dass der Einfluss von Beladung mit Passagieren sowie Gepäck auf Fahrzeugparameter wie Masse, Trägheiten und Schwerpunktlage um ein Vielfaches größer ist. Eine Annahme in etwa konstant bleibender Parameter für Regelsysteme oder Zustandsschätzer ist daher nicht möglich.
Ziel
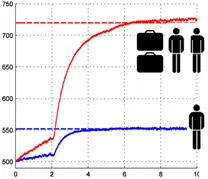
Das Ziel ist daher, diese physikalischen Größen während der ersten Minuten einer beliebigen Fahrt zu ermitteln, um die Genauigkeit von modellbasierten Regelsystemen zu verbessern. Als Randbedingung wird gefordert, dass keinerlei zusätzliche Sensorik zur Verfügung steht, die über die Standardausstattung von Fahrzeugen mit ESP hinausgeht.
Vorgehensweise
Ausgehend von einem geeigneten nichtlinearen Fahrzeug- und Reifenmodell werden verschiedene Algorithmen in Form echtzeitfähiger Filter und Optimierer implementiert. Auf Basis einer zu definierenden Normfahrt werden diese verglichen und hinsichtlich der Abhängigkeit des Konvergenzverhaltens und der Schätzgüte von der Dynamik der Fahrt bewertet.
Nach einer simulativen Auslegung erfolgt die Erprobung im Fahrversuch mit dem Versuchsträger MUTE.