Autonomous Vehicle Lab
Unser Ziel ist die Entwicklung modularer Algorithmen für Autonomes Fahren mit dem Ziel einer optimalen und konsistenten Gesamtsoftware und der Anwendung unter realen Bedingungen, welches wir durch einen Softwareaufbau auf standardisierten Schnittstellen sowie einer umfassenden Simulationsumgebung und Erprobung im Forschungsfahrzeug verfolgen.
Team AV Perception
Kontakt: Felix Fent, M.Sc.
Team AV Planning & Control
Kontakt: Professorship Autonomous Vehicle Systems (AVS), Prof. Dr. Johannes Betz
Versuchsträger

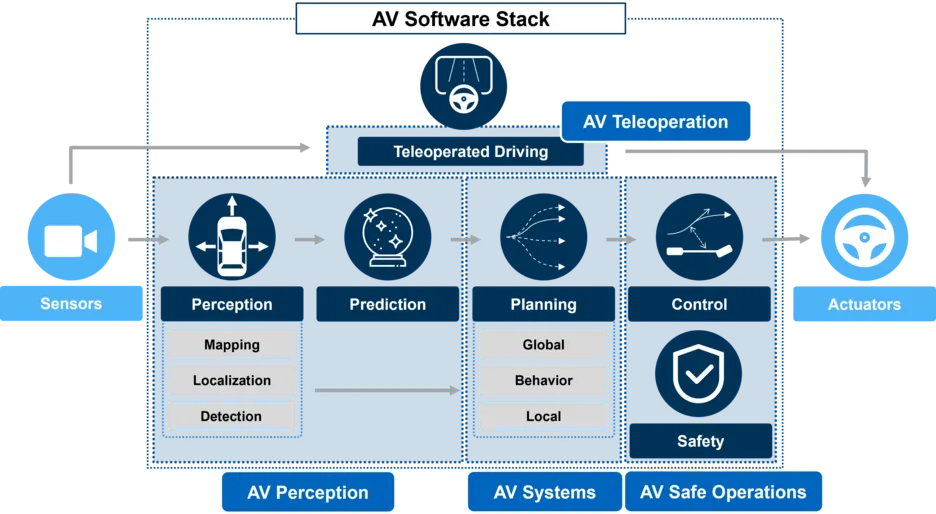
Kernkompetenzen
