

TUMDOT-MUC
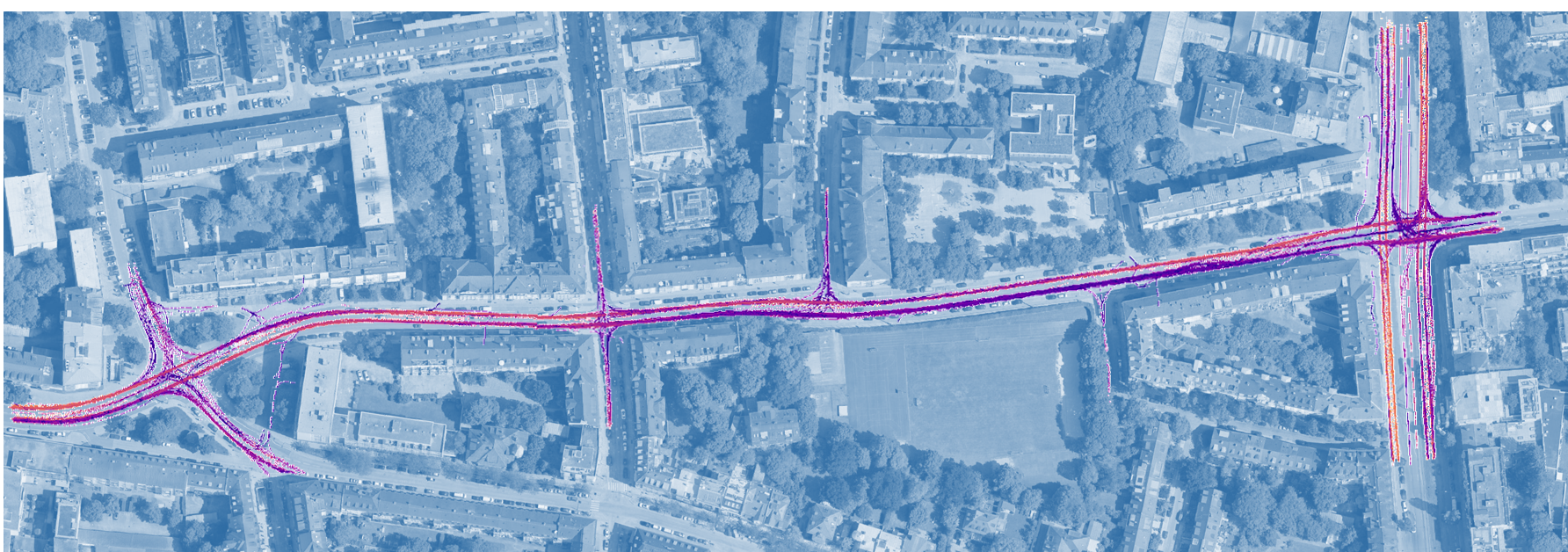
Der TUMDOT-MUC-Datensatz enthält Trajektorien aus Videos, die mit Drohnen im Oktober 2022 in München, Deutschland, aufgenommen wurden. Mit insgesamt 12 Drohnen wurden an zwei Werktagen nachmittags 6 räumlich zusammenhängende Standorte für jeweils mehr als 3 Stunden beobachtet. Die räumlich und zeitlich verknüpften Daten aus dem 700 m langen Abschnitt entlang der Rheinstraße befinden sich derzeit in der Endphase der Nachbearbeitung. Der zweite Aufnahmetag (Mittwoch, 12. Oktober) ist inzwischen verfügbar und kann heruntergeladen werden. Der erste Tag wird sobald wie möglich veröffentlicht.
Die Daten werden als csv-Dateien mit einer Länge von 10 Minuten pro Datei bereitgestellt. Die Daten sind zeitlich und räumlich mit eindeutigen Track-IDs für jedes Objekt zusammengeführt. Die Aufnahmen wurden mit 25 Bildern pro Sekunde erzeugt, wobei die Analyse bei jedem zweiten Bild erfolgte. Dementsprechend ist alle 0,08 Sekunden ein neuer Zeitstempel verfügbar. Der Zeitstempel ist in Sekunden relativ zur zum ersten Zeitpunkt, als jede Drohne in der Luft war, gegeben. Zeitstempel 0 entspricht also der Zeit 14:59:25. Die Position ist als Koordinate relativ zum Referenzpunkt (692009.0, 5338095.0, 0.0) im Koordinatensystem UTM 32 N angegeben und bezieht sich auf den Mittelpunkt des Objekts am Boden. Darüber hinaus sind die Dimension der Bounding Box in Metern, die Geschwindigkeit in m/s und die Beschleunigung in m/s² im globalen Koordinatensystem sowie die Orientierung in Form eines Rotationsvektors verfügbar. Die Objektkategorie wird als numerische Zahl angegeben. Die Zuordnung der Nummern zu den Objektkategorien, sowie weitere Informationen sind in der Datei "meta_information.json" zu finden.
Es gibt bekannte Probleme mit dem Datensatz, die folgend aufgeführt sind:
- Aufgrund von technischen Fehlern und der hohen Komplexität der Koordinierung des Austauschs in der Luft gibt es vereinzelt zeitliche Lücken in den Daten. Diese sind der Publikation zu entnehmen.
- Durch die vertikale Sicht der Drohnen aus einer Höhe von ca. 110 m kommt es zu Behinderungen durch Bäume und durch eine Baustelle. Insbesondere rund um den Bonner Platz und entlang des nördlichen Teils der Rheinstraße konnten daher VRU nicht kontinuierlich erfasst werden. Die verdeckten Bereiche, sowie die Tracking Filter sind in der Publikation dargestellt.
- Aufgrund der großen Flughöhe werden Personen, die in Gruppen gehen, sowie zwei (oder mehr) Personen, die sehr nahe beieinander gehen, oft nicht korrekt pro Person klassifiziert. Die Tracking-IDs tauschen und springen zwischen den Fußgängern hin und her, so dass die Daten hier nicht für eine eingehende Analyse von Personen, die in Gruppen gehen, verwendet werden sollten.
- Wegen des minimalen zeitlichen Versatzes zwischen den einzelnen Videos und dem nicht immer vollständig korrekt möglichen räumlichen Verschneidungen kommt es (teilweise) an den Videoübergängen zu kleinen Sprüngen in den Trajektorien.
Eine ausführliche Beschreibung des Datensatzes ist im Data Science for Transportation Journal zu finden: https://link.springer.com/article/10.1007/s42421-024-00101-5
Die Daten sind Open Source für die Forschung/nicht-kommerzielle Nutzung verfügbar (Creative Commons CC BY-NC 4.0 Lizenz).
Wir ermutigen Sie, diesen einzigartigen Datensatz für Ihre eigene Forschung zu verwenden, und bitten Sie, bei jeder Veröffentlichung und Forschung, die den TUDOT-MUC-Datensatz verwendet, den Vermerk
"Datenquelle: TUMDOT-MUC https://www.mos.ed.tum.de/en/vt/research/data-sets/tumdot-muc"
in die Danksagung einzubinden und verweisen Sie auf unsere beschreibende Veröffentlichung:
Kutsch, A., Margreiter, M. & Bogenberger, K.: TUMDOT–MUC: Data Collection and Processing of Multimodal Trajectories Collected by Aerial Drones. Data Science for Transportation, 6, 15 (2024). https://doi.org/10.1007/s42421-024-00101-5
Bitte zögern Sie nicht, uns zu kontaktieren, wenn Sie Fragen, Probleme oder weitere Ideen zur Verbesserung der Datenqualität haben.
Kontakt: Alexander Kutsch (alexander.kutsch(at)tum.de)
Dieser Datensatz wurde mit Hilfe der FairFleet GmbH (Fliegen der Drohnen), der DeepScenario GmbH (Extraktion der Trajektorien) und 3D Mapping Solutions (HD-Map) erstellt – vielen Dank an alle Partner!